
Abstract.
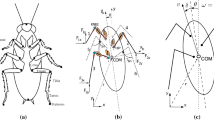
We study the dynamics and stability of legged locomotion in the horizontal plane. Motivated by experimental studies of insects, we develop two- and three-degree-of freedom rigid body models with pairs of ‘virtual’ elastic legs in intermittent contact with the ground. We focus on conservative compliant-legged models, but we also consider prescribed forces, prescribed leg displacements, and combined strategies. The resulting mechanical systems exhibit periodic gaits whose stability characteristics are due to intermittent foot contact, and are largely determined by geometrical criteria. Most strikingly, we show that mechanics alone can confer asymptotic stability in heading and body orientation. In a companion paper, we apply our results to rapidly running cockroaches.
Similar content being viewed by others


Author information
Authors and Affiliations
Additional information
Received: 6 September 1999 / Accepted in revised form: 8 May 2000
Rights and permissions
About this article
Cite this article
Schmitt, J., Holmes, P. Mechanical models for insect locomotion: dynamics and stability in the horizontal plane I. Theory. Biol Cybern 83, 501–515 (2000). https://doi.org/10.1007/s004220000181
Issue Date:
DOI: https://doi.org/10.1007/s004220000181